目录
- 一、准备工作
- 1、CubeMX 安装Nano pack
- (1)获取软件包地址
- (2)打开 CubeMX
- (3)下载安装完成后如下,前面的勾选框变为绿色
- 2、Keil MDK安装 RT-Thread
- (1)打开 MDK 软件,点击工具栏的 Pack Installer 图标
- (2)点击右侧的 Pack
- 二、CubuMX新建文件
- 1、芯片选择STM32F103C8
- 2、选择 Nano 组件
- (1)点击 Softwares Packages
- (2)选择 RealThread
- (3)这时会新增Software Packs
- 3、RCC配置
- 4、SYS配置
- 5、USART1配置
- 6、GPIO选择A3,A4串口
- 7、NVIC选择
- 8、时钟树配置
- 9、生成项目
- 三、代码修改
- 1、Keil添加 RT-Thread Nano 到工程
- (1)打开刚才用CubeMX创建的项目
- (2)找到 RTOS勾选 kernel,点击 OK
- 2、代码添加修改
- (1)创建任务
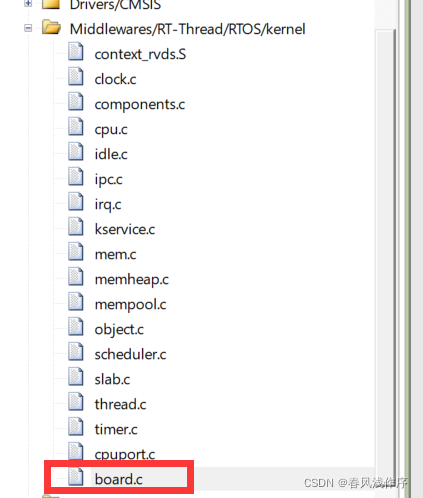
- (2)找到board.c文件
- (3)找到app_rt_thread.c下的rtconfig.h
- (4)在main.c文件中添加代码
- (5)在main函数里添加如下代码
- 四、运行结果
一、准备工作
1、CubeMX 安装Nano pack
(1)获取软件包地址
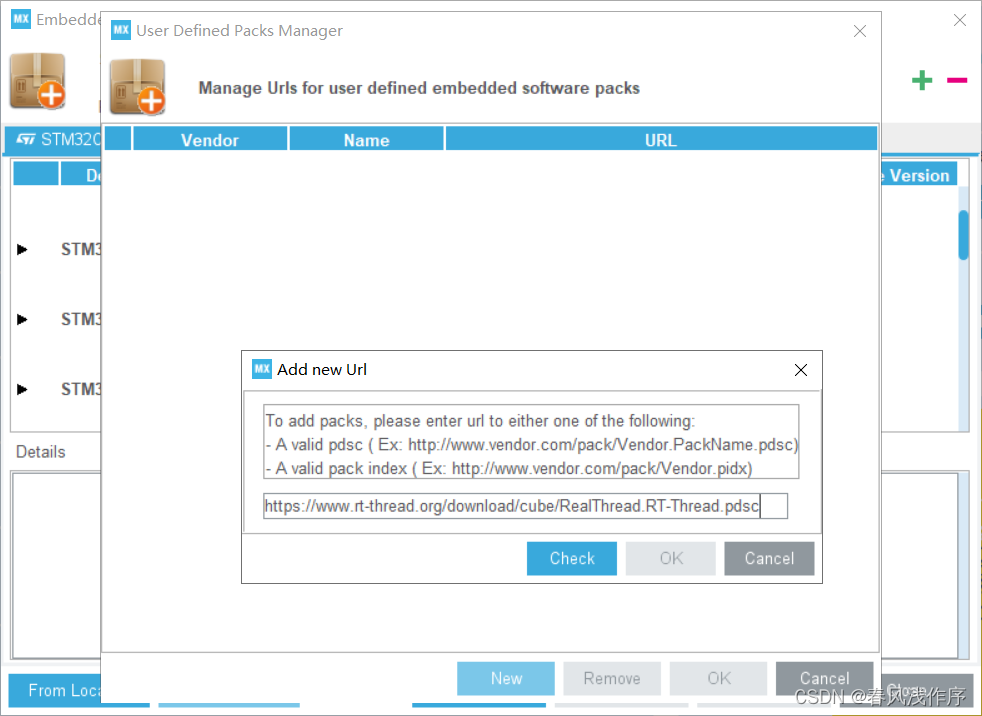
要获取 RT-Thread Nano 软件包,需要在 CubeMX 中添加
https://www.rt-thread.org/download/cube/RealThread.RT-Thread.pdsc
(2)打开 CubeMX
从菜单栏 help 进入 Manage embedded software packages 界面,点击 From Url 按钮,进入 User Defined Packs Manager 界面,其次点击 new,填入上述网址,然后点击 check
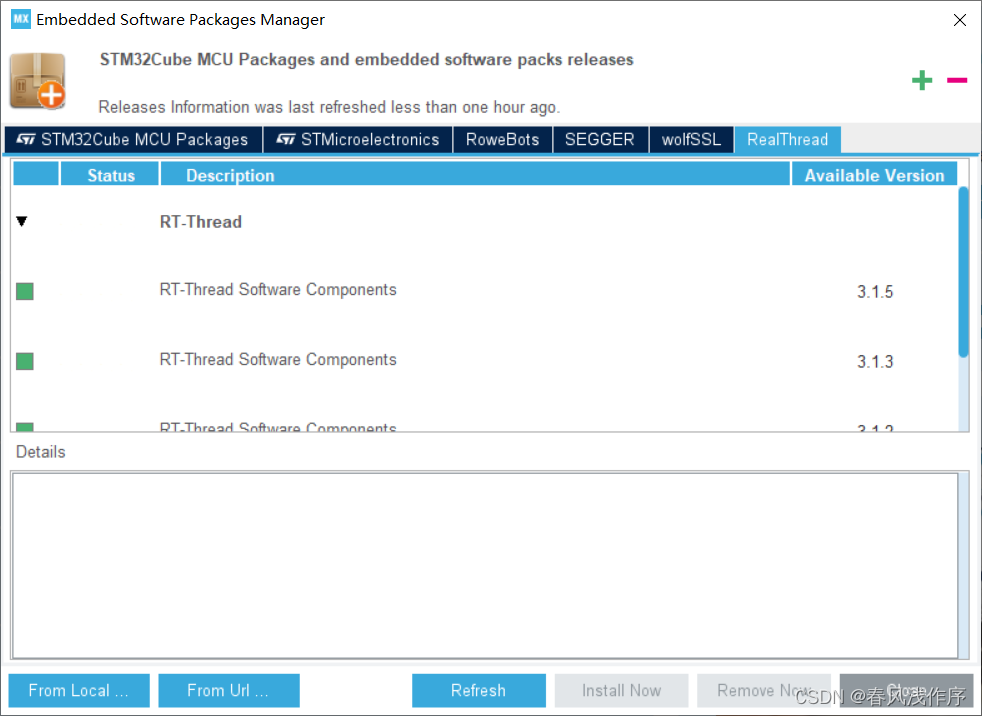
(3)下载安装完成后如下,前面的勾选框变为绿色
2、Keil MDK安装 RT-Thread
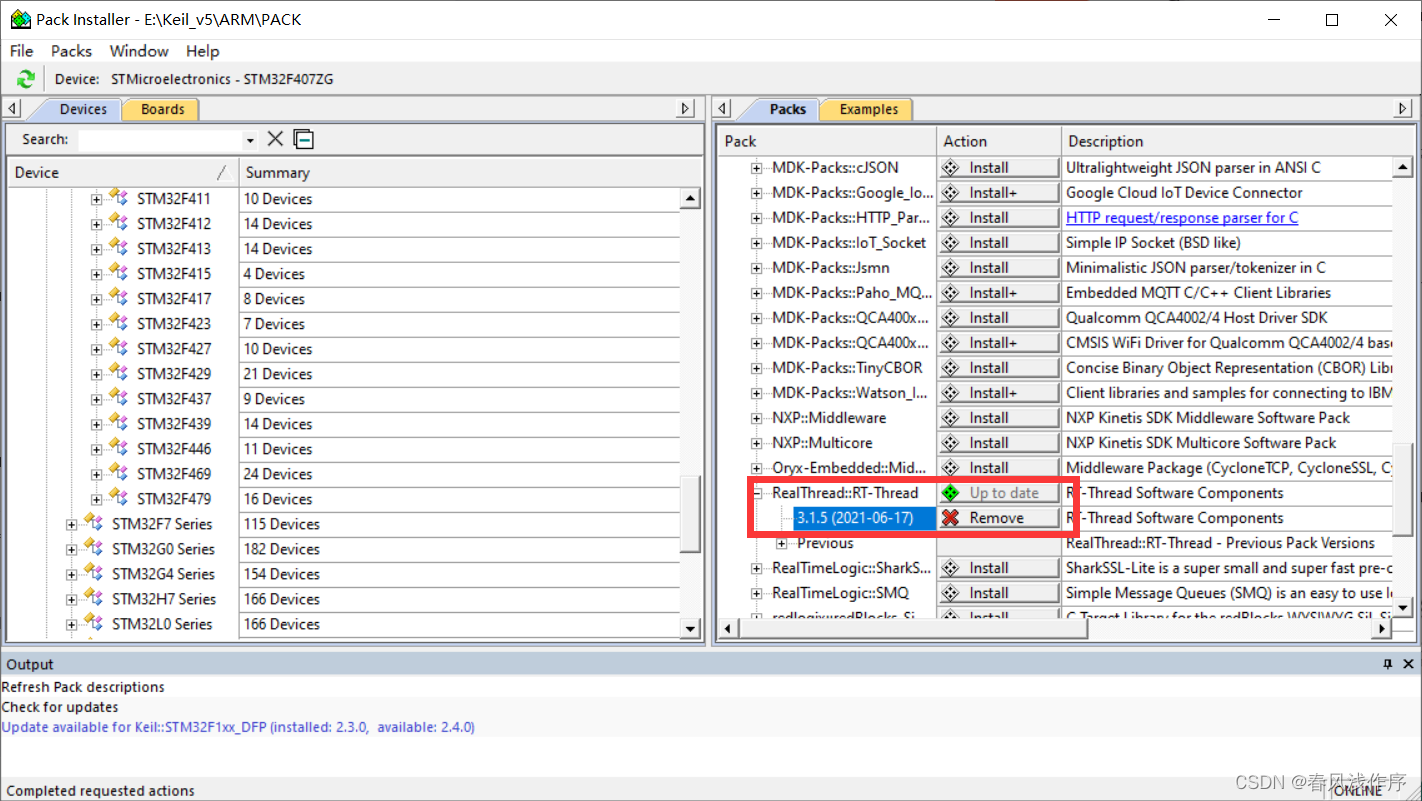
(1)打开 MDK 软件,点击工具栏的 Pack Installer 图标

(2)点击右侧的 Pack
展开 Generic,可以找到 RealThread::RT-Thread,点击 Action 栏对应的 Install ,就可以在线安装 Nano Pack 了。
二、CubuMX新建文件
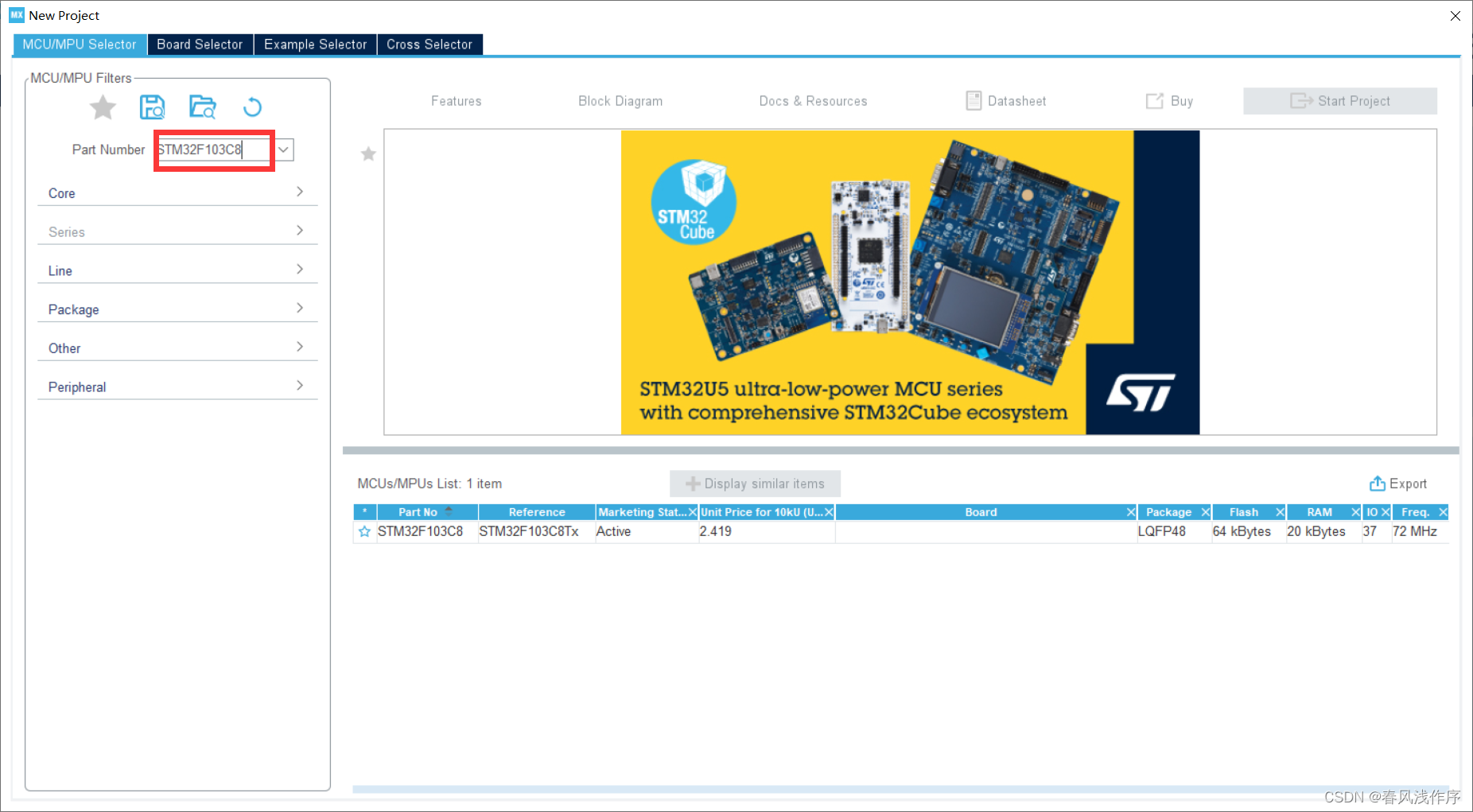
1、芯片选择STM32F103C8
2、选择 Nano 组件
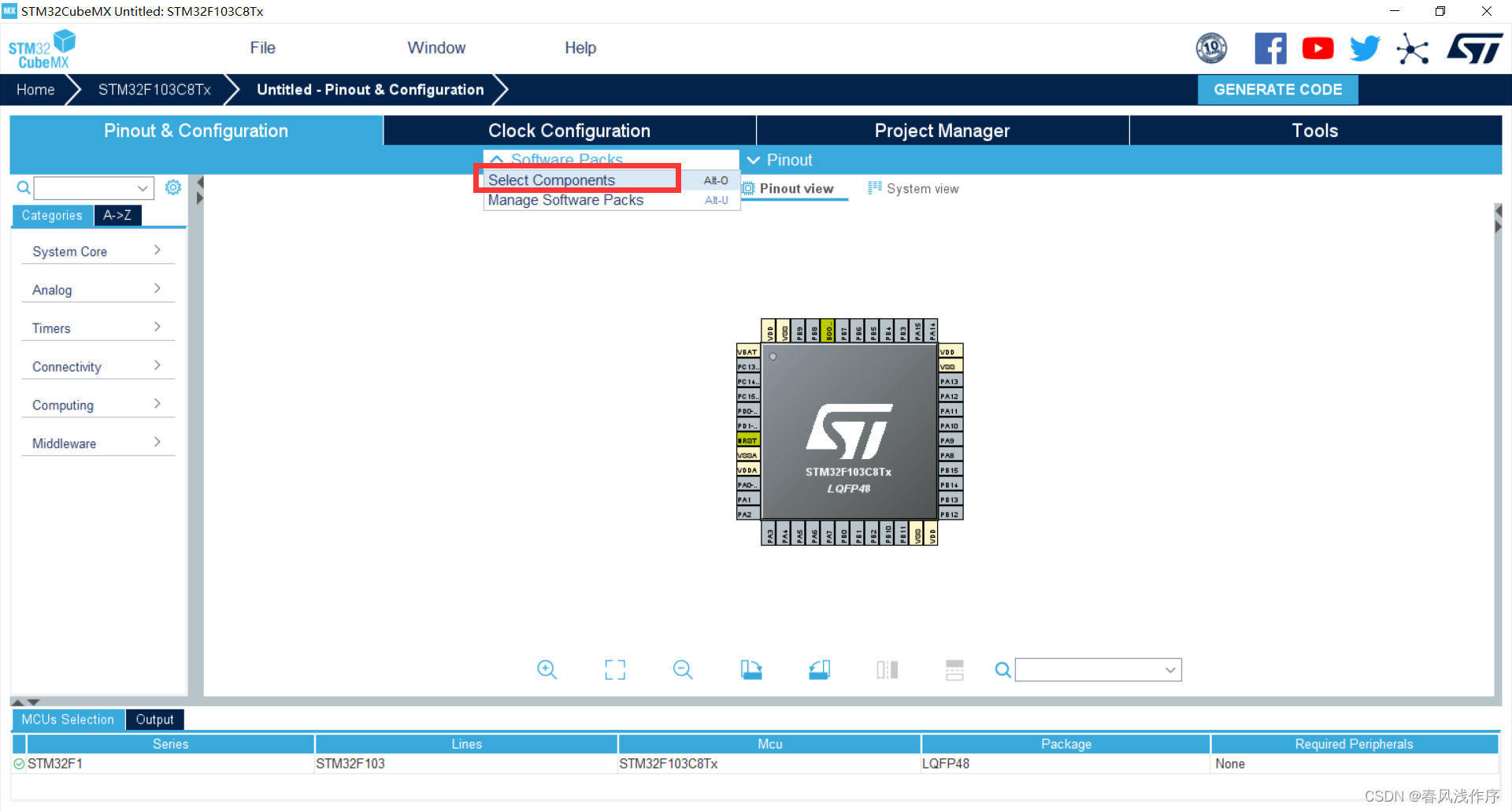
(1)点击 Softwares Packages
选择Select Components,进入组件配置界面
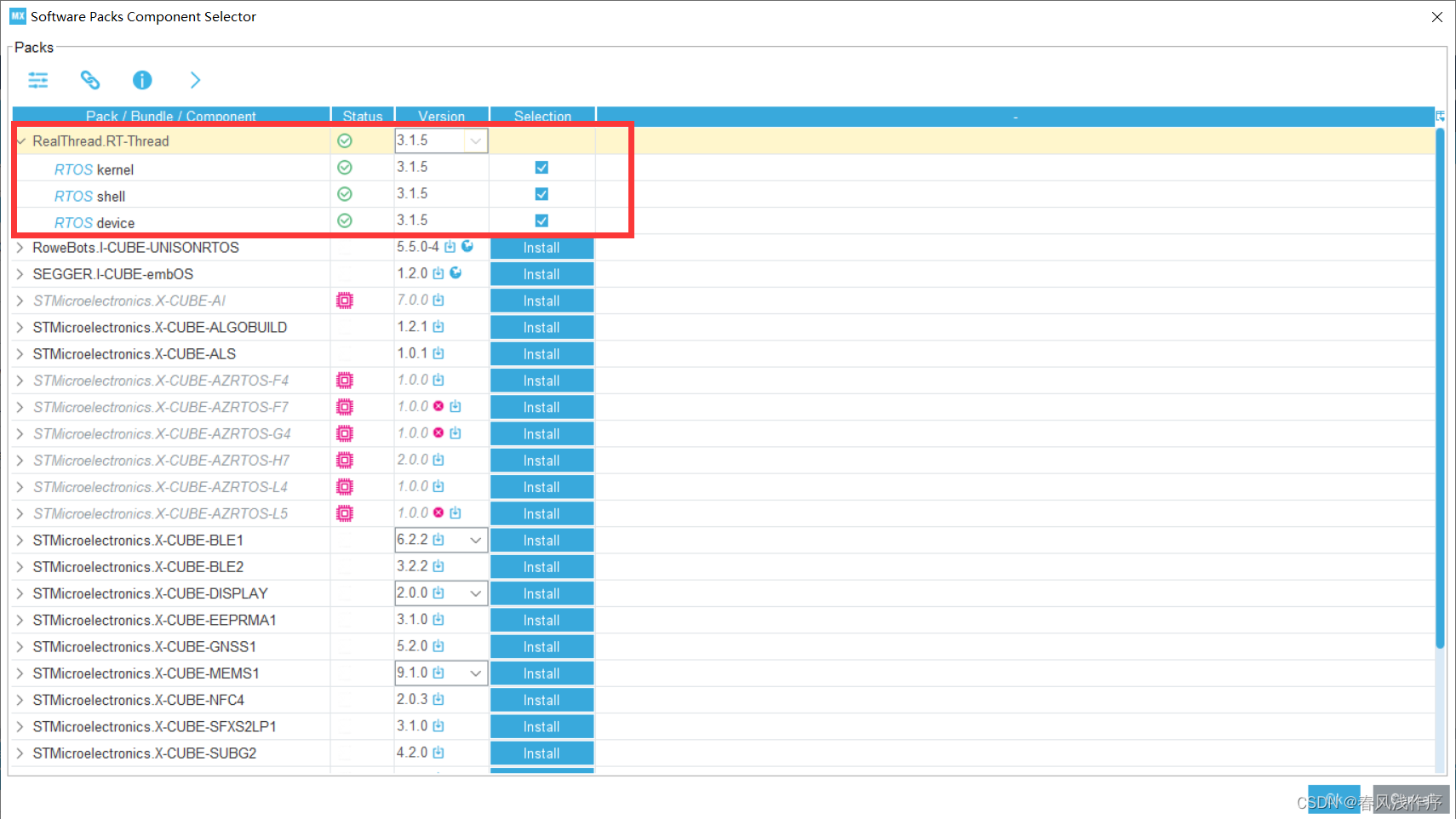
(2)选择 RealThread
然后根3.1.5版本的,然后点击 OK 按钮
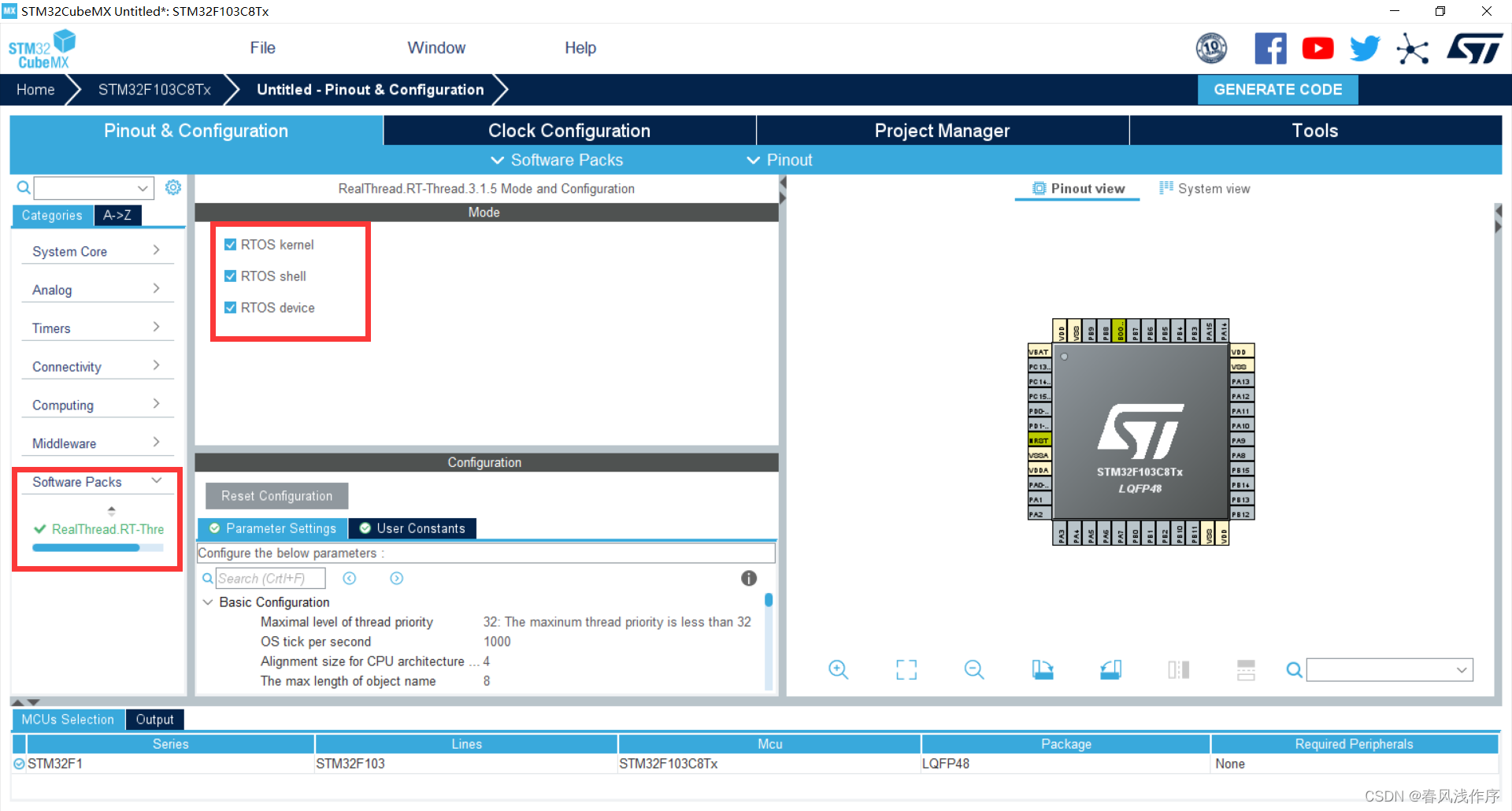
(3)这时会新增Software Packs
展开就可以看见添加的RealThread.RT_Thread,勾选相应内容
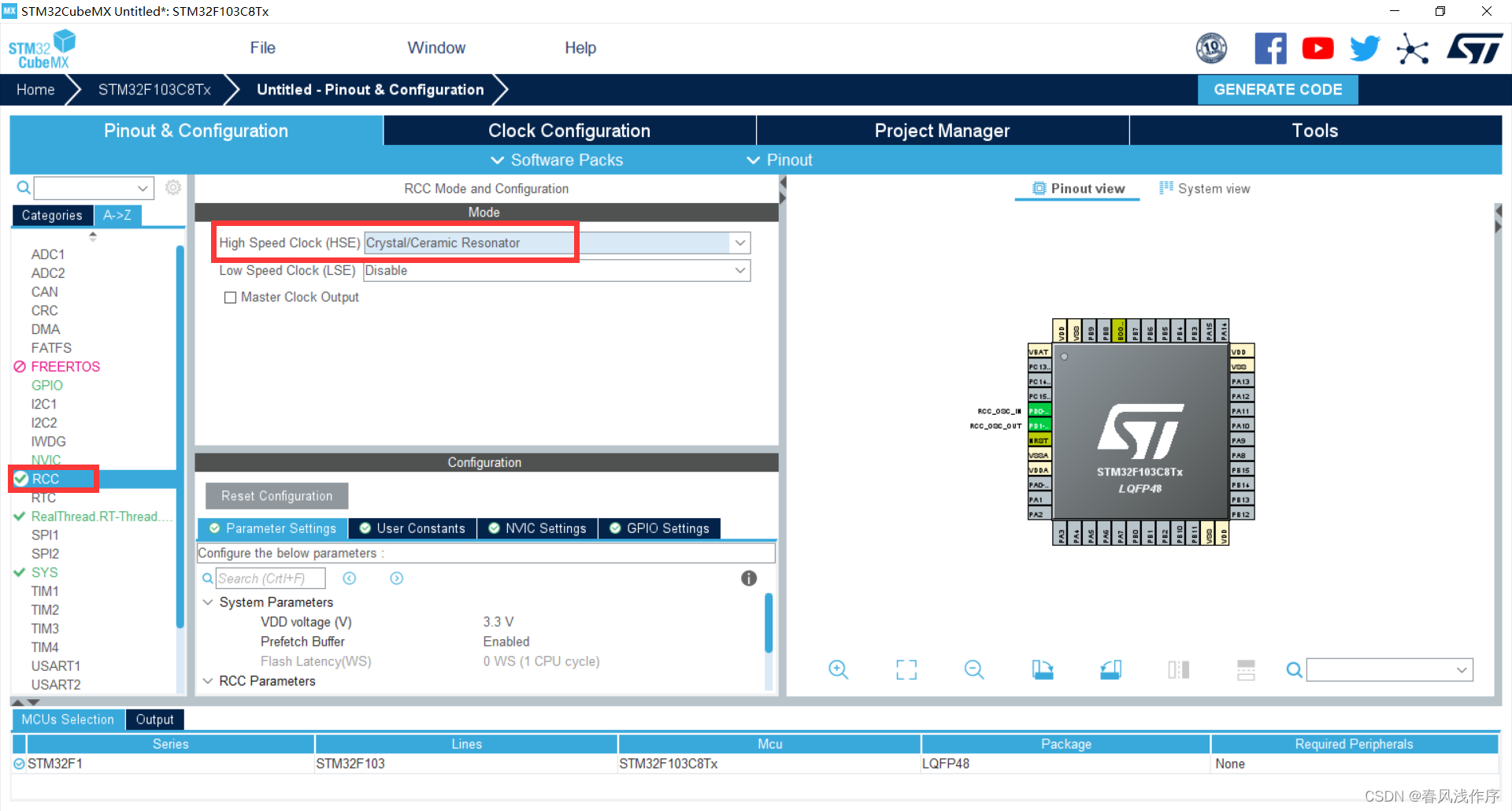
3、RCC配置
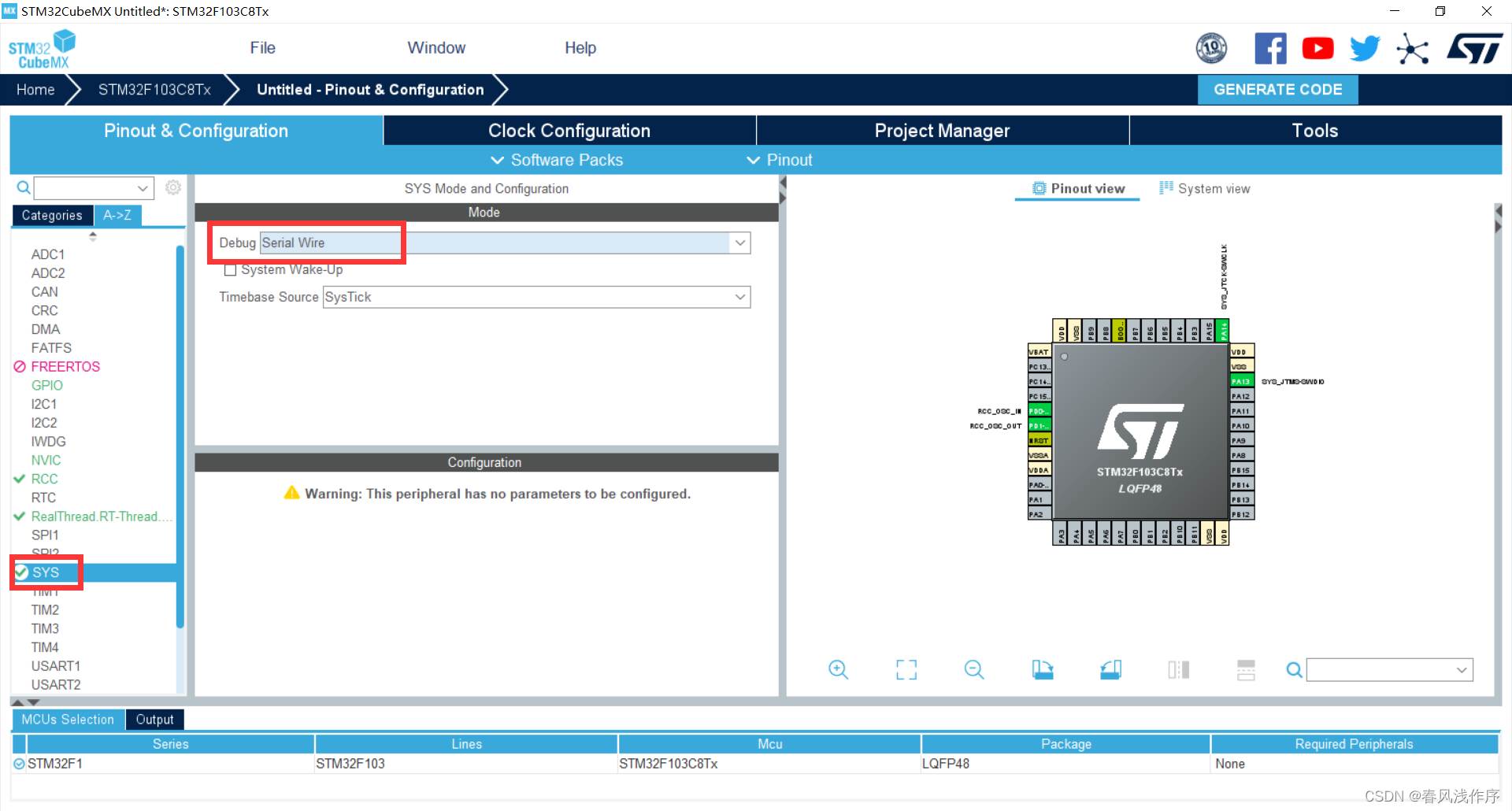
4、SYS配置
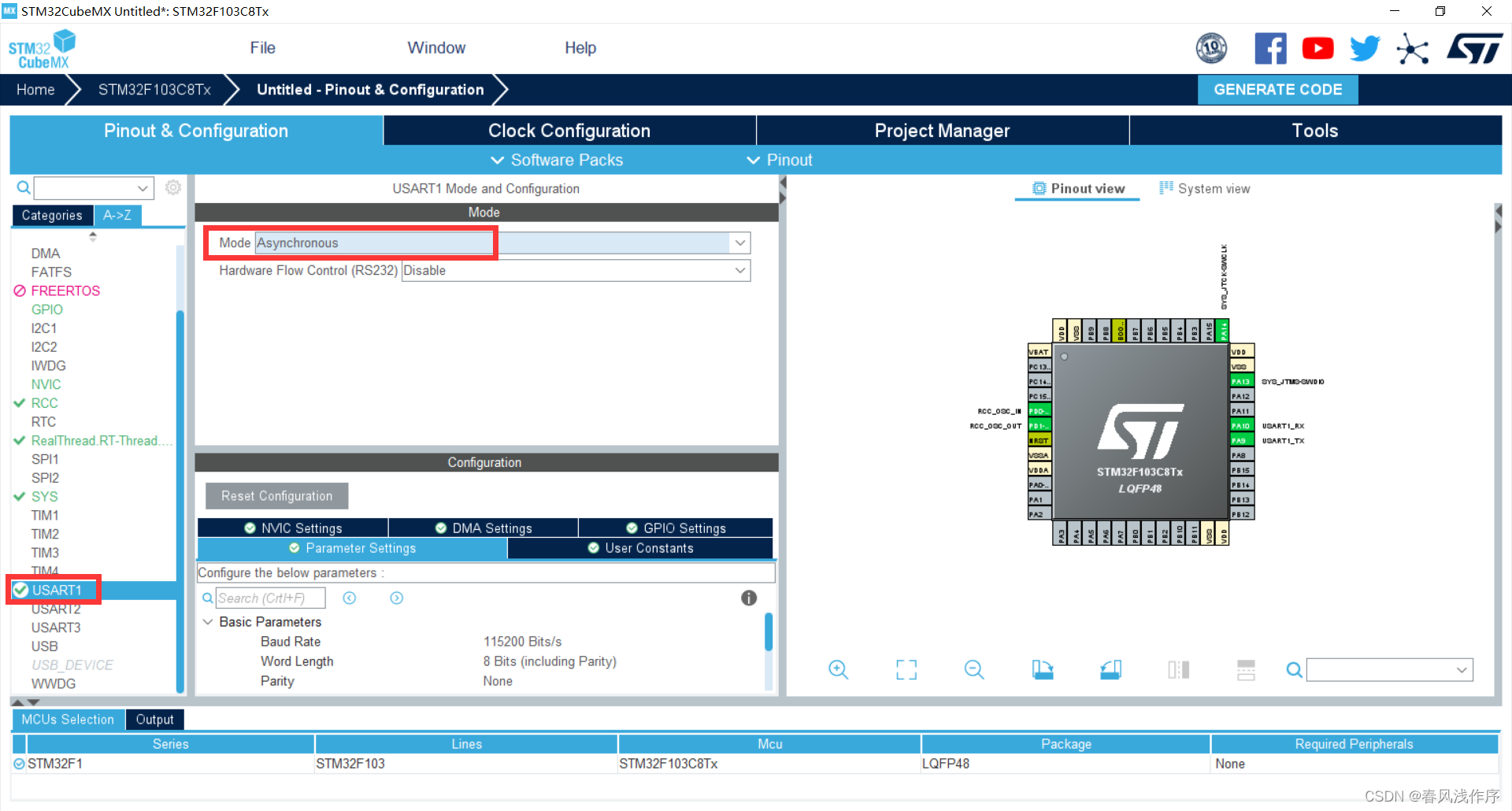
5、USART1配置
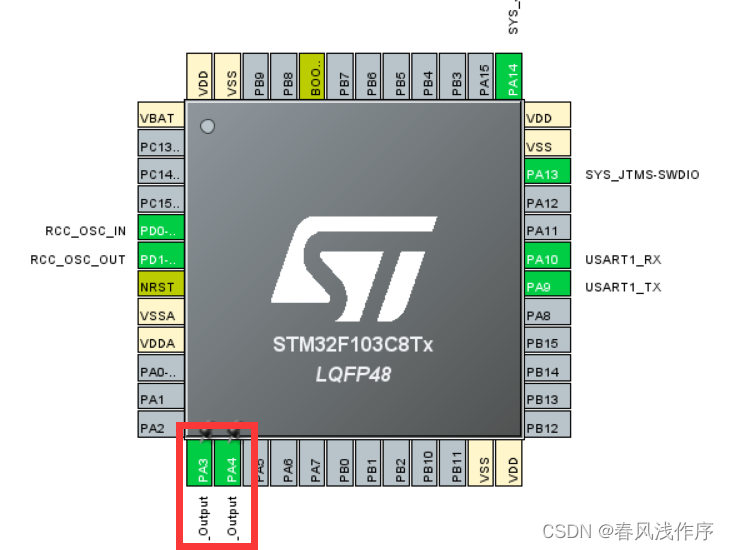
6、GPIO选择A3,A4串口
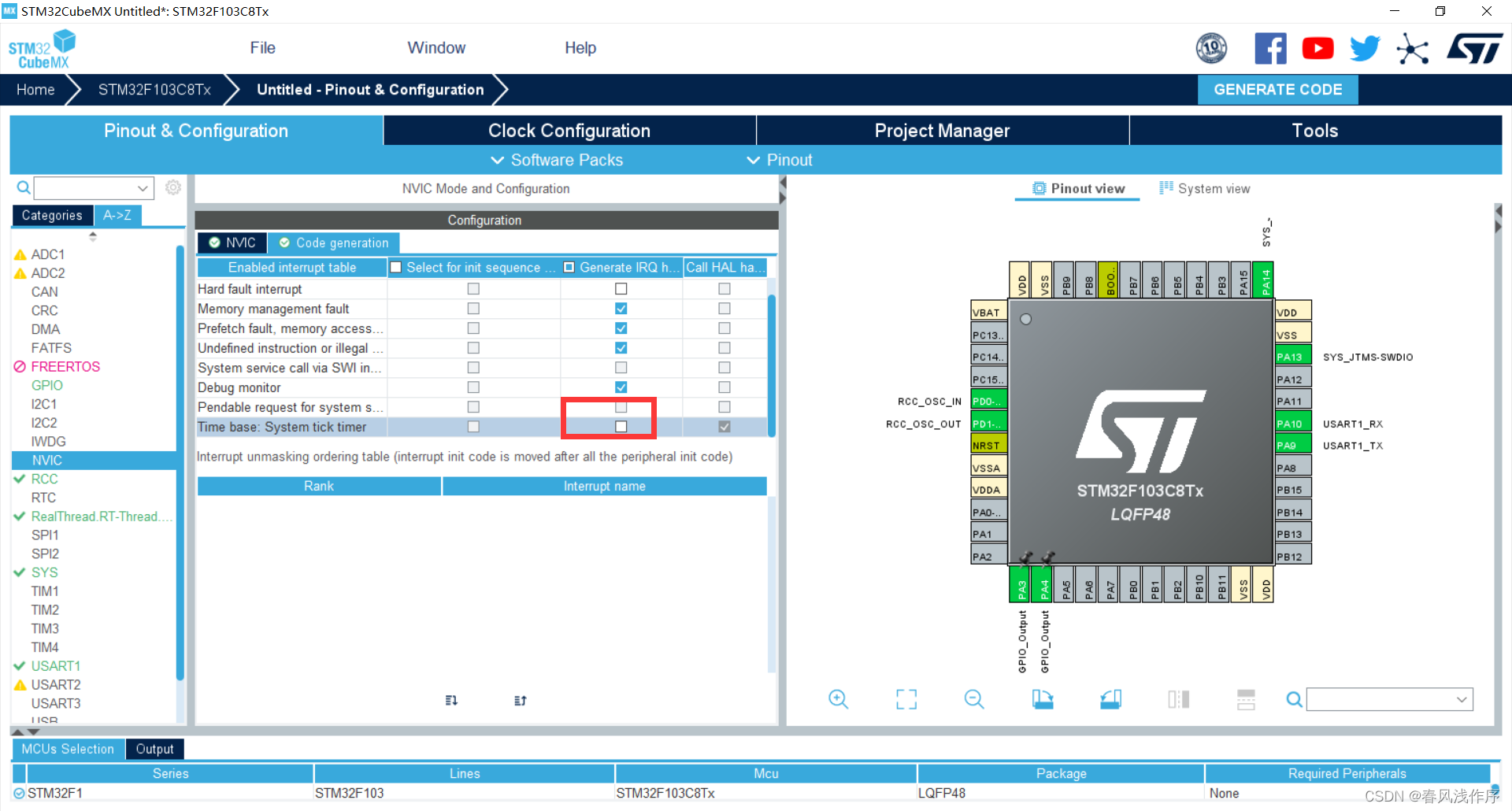
7、NVIC选择
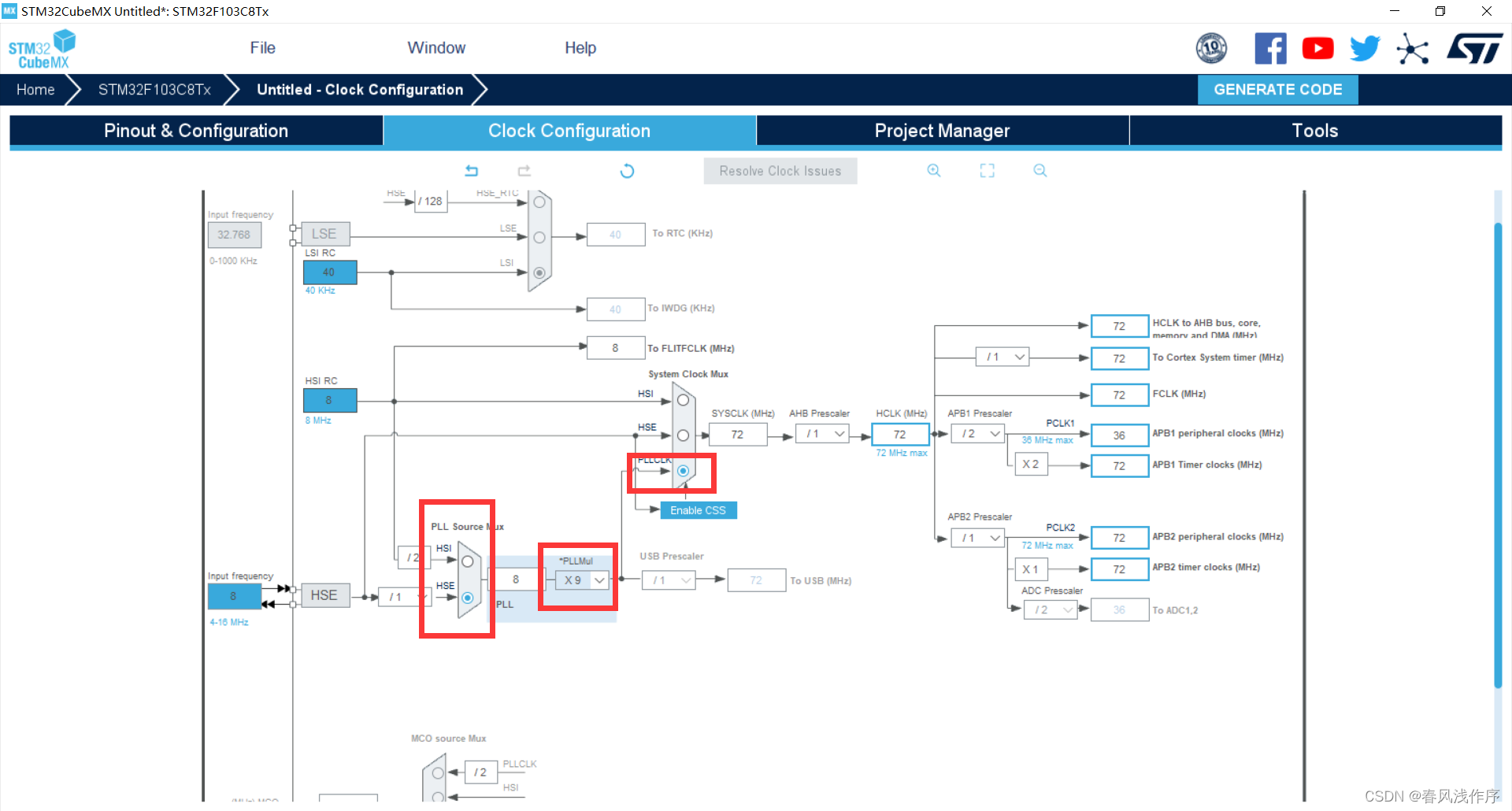
8、时钟树配置
9、生成项目
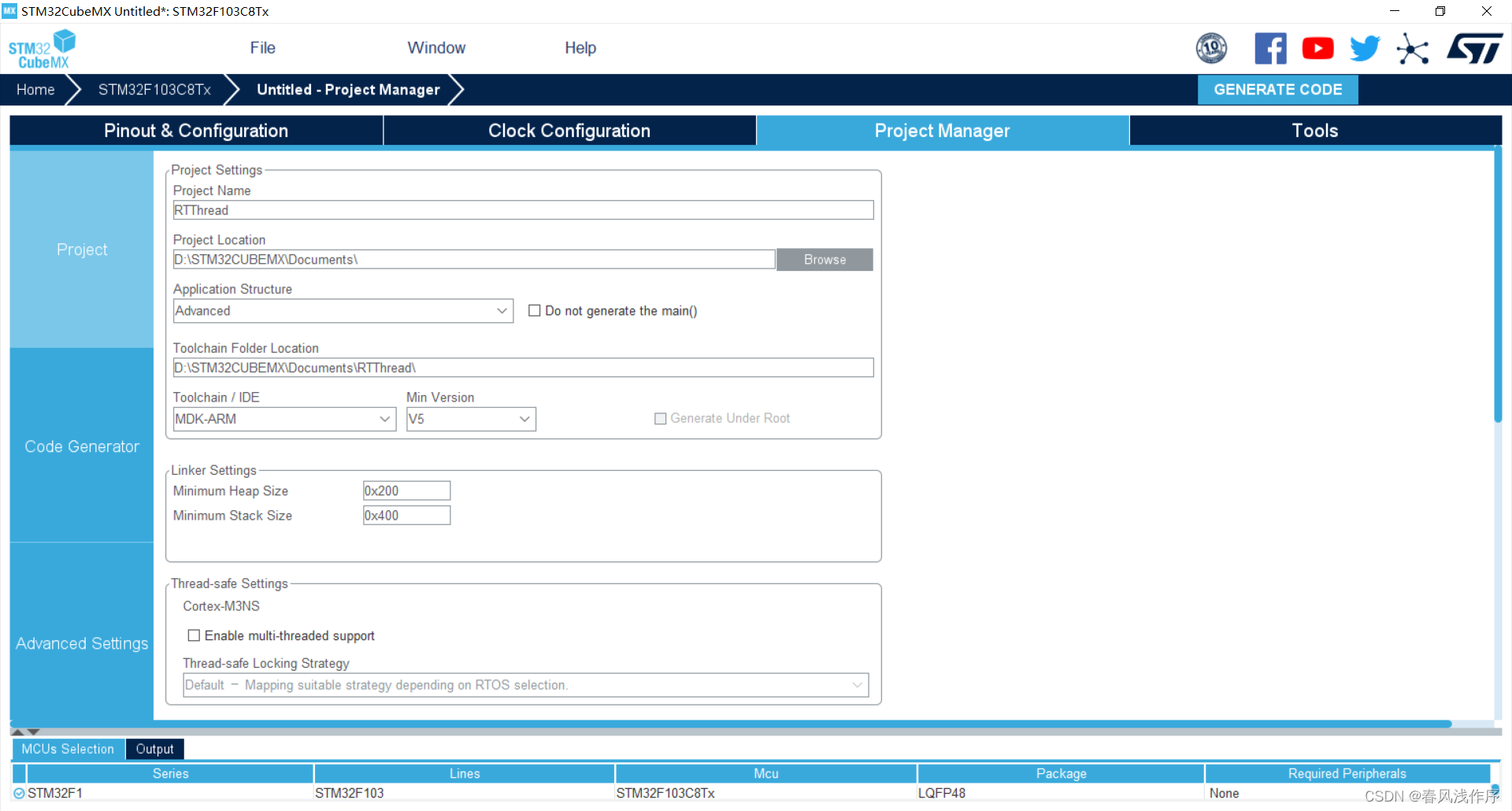
创建完成后用Keil MDK打开
三、代码修改
1、Keil添加 RT-Thread Nano 到工程
(1)打开刚才用CubeMX创建的项目
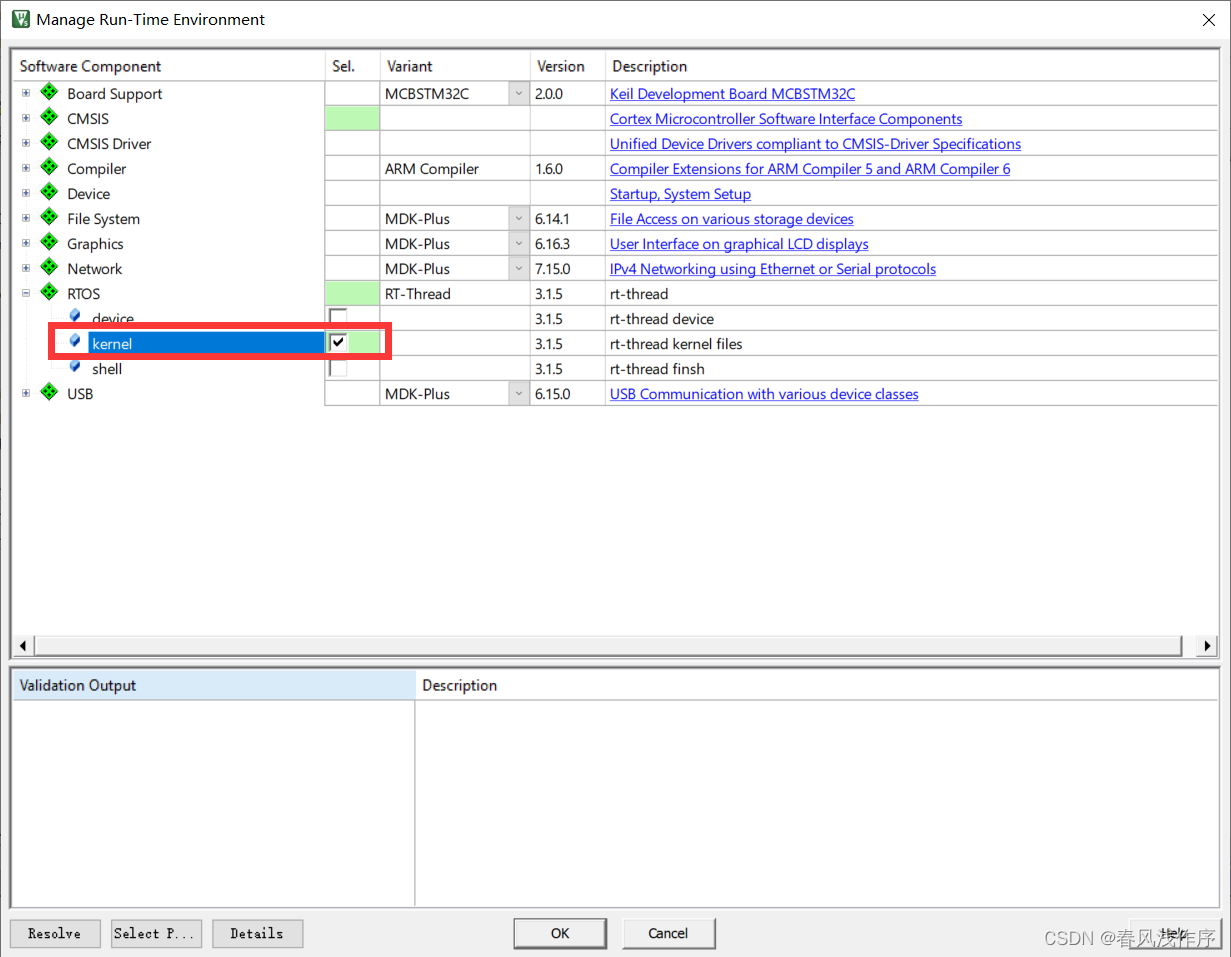
点击点击 Manage Run-Time Environment。

(2)找到 RTOS勾选 kernel,点击 OK
2、代码添加修改
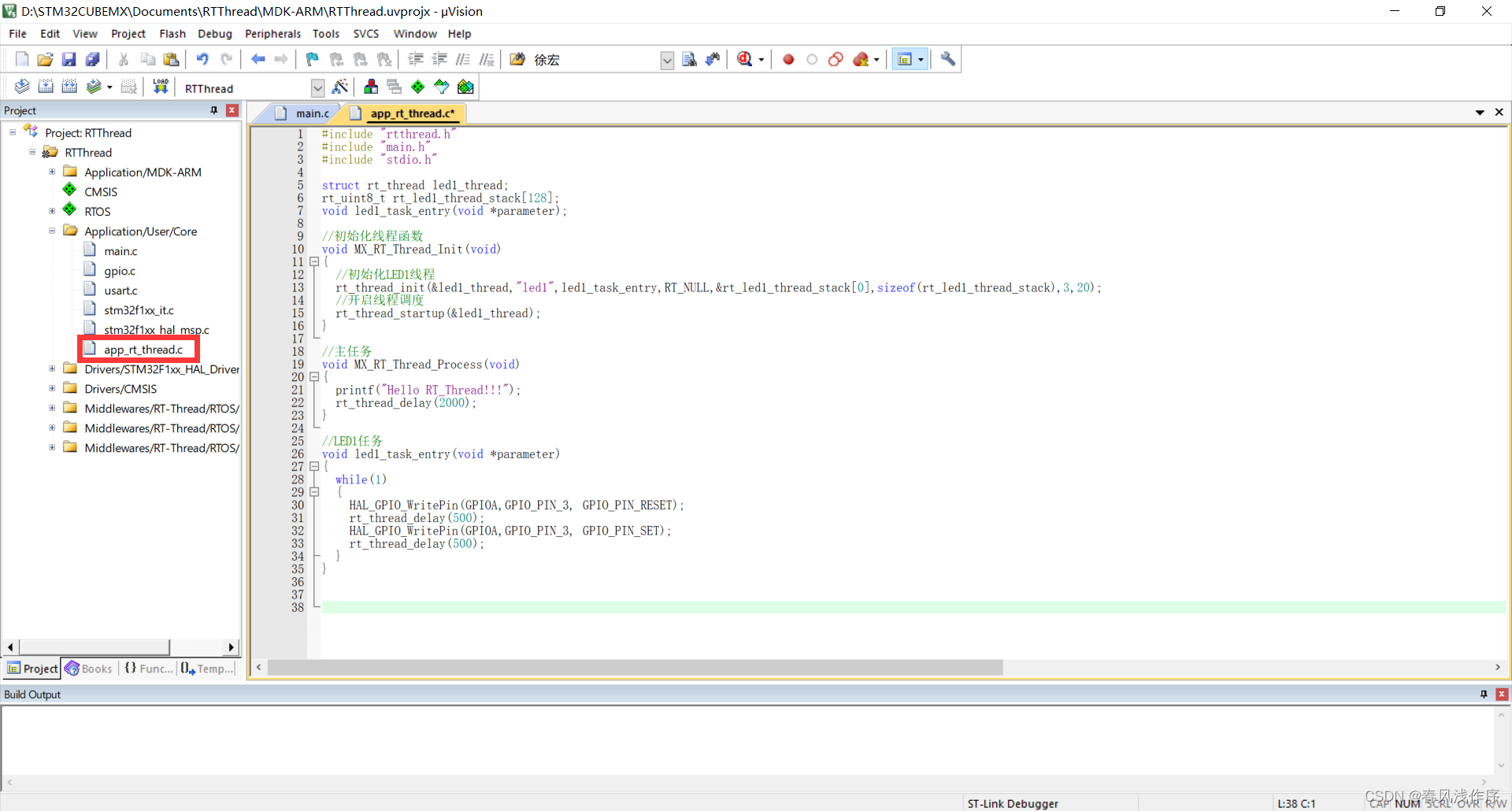
(1)创建任务
在Application/USER文件夹下新建app_rt_thread.c文件,并添加以下代码
#include "rtthread.h"
#include "main.h"
#include "stdio.h"
struct rt_thread led1_thread;
rt_uint8_t rt_led1_thread_stack[128];
void led1_task_entry(void *parameter);
//初始化线程函数
void MX_RT_Thread_Init(void)
{
//初始化LED1线程
rt_thread_init(&led1_thread,"led1",led1_task_entry,RT_NULL,&rt_led1_thread_stack[0],sizeof(rt_led1_thread_stack),3,20);
//开启线程调度
rt_thread_startup(&led1_thread);
}
//主任务
void MX_RT_Thread_Process(void)
{
printf("Hello RT_Thread!!!");
rt_thread_delay(2000);
}
//LED1任务
void led1_task_entry(void *parameter)
{
while(1)
{
HAL_GPIO_WritePin(GPIOA,GPIO_PIN_3, GPIO_PIN_RESET);
rt_thread_delay(500);
HAL_GPIO_WritePin(GPIOA,GPIO_PIN_3, GPIO_PIN_SET);
rt_thread_delay(500);
}
}
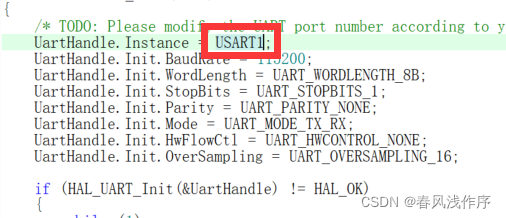
(2)找到board.c文件
修改串口USART2为USART1
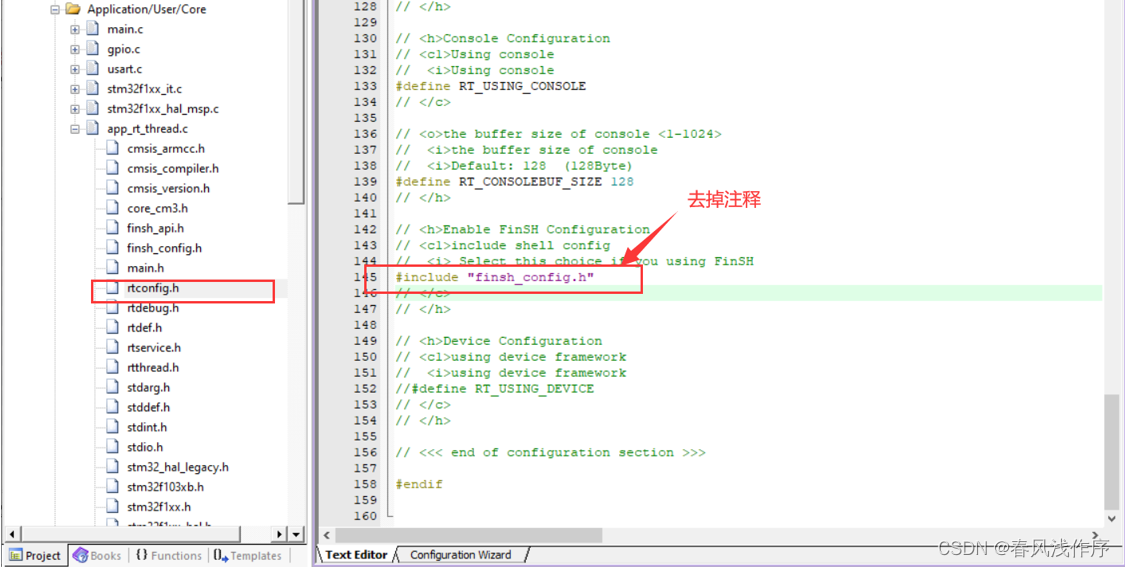
(3)找到app_rt_thread.c下的rtconfig.h
(4)在main.c文件中添加代码
/* Private typedef -----------------------------------------------------------*/
/* USER CODE BEGIN PTD */
extern void MX_RT_Thread_Init(void);
extern void MX_RT_Thread_Process(void);
/* USER CODE END PTD */
(5)在main函数里添加如下代码
MX_RT_Thread_Init();
while循环中添加代码
HAL_GPIO_TogglePin(GPIOA,GPIO_PIN_4);
rt_thread_delay(1000);
四、运行结果