第一部分 海事数据
Chapter 1 Maritime Reporting System
在本章中作者介绍了当下流行的船舶报告系统(Vessel Reporting System,VRS)、分析了各自的优缺点。描述了船舶报告系统的几个具体应用和潜在用途。
1.1 Introduction
目前,IMO根据《海上人命安全公约》(SOLAS公约)第V/11号条例,在世界范围内至少采用了23种强制性商业船舶报告制度。
SOLAS公约:Safety of Life at Sea
国际海上人命安全公约(International Convention for Safety of Life at Sea,简称 SOLAS) (1974)是各缔约国政府共同制订的统一原则和有关规则,旨在增进海上人命安全。也是考虑到《1960年国际海上人命安全公约》缔结以来的发展情况后,一致认为需要缔结的用以代替1960年国际公约的原则,此原则可以更好地达到“增进海上人命安全”这一目的
国际海上人命安全公约_百度百科
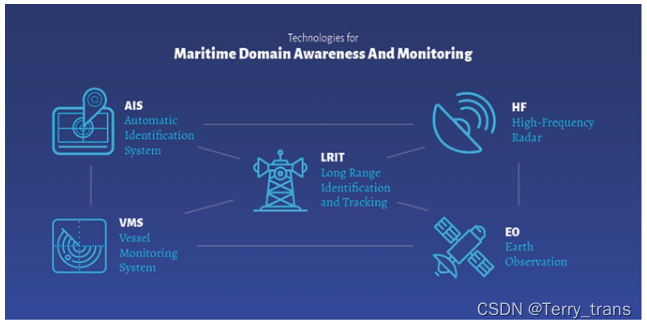
图1:海事态势感知报告系统的使用
一般而言船舶跟踪系统可分为两大类:协作系统和非协作系统 (cooperative and non-cooperative systems)
Cooperative systems rely on the vessels crews’ collaboration to identify and report the information about a vessel,while non-cooperative systems are designed to detect and track vessels that do not rely on the vessels crews’ collaboration.
协作系统依靠船员的协作来识别和报告船舶信息,而非协作系统则是在不需要船员协作的前提下检测和追踪船舶。
| 协作系统 | 非协作系统 |
| 船舶自动识别系统(AIS) | 海岸雷达(coastal radar) |
| 船舶远程监控管理系统(VMS) | 高频雷达(HF radar) |
| 船舶远程识别与追踪系统(LRIT) | 主动式声呐(active sonar) |
| 被动式声呐(passive sonar) | |
| 地面/船载摄像头 | |
| 卫星 | |
| 机载地球观测系统(EO) |
尽管船舶追踪系统种类繁多,产生了大量的数据流,但这些数据提供的“view”仍然是一种局部的。在这种情况下,数据融合至关重要。(data fusion)
The advantage in fusing data from multiple sensors and sources is that ①the final estimated
vessel trajectories are more accurate and with better confidence, / extending to features
that are impossible to perceive with individual sensors and sources, in less time, and at a lower cost. ②Also, it contributes towards better coverage and robustness to failure, thus improving the reliability and quality of the situational picture.
数据融合可以在更短的时间、更低的成本,得到仅使用单一数据源无法获取的更多特征,从而使得轨迹预测更准确,可信度更高。同时,提高了对误差的覆盖率和鲁棒性。
后续的本章节目录
1.2 船舶自动识别系统(AIS)
1.3 VHF数据交换系统(VDES)
1.4 船舶远程识别与追踪系统(LRIT)
1.5 渔业船舶监管系统
1.6 船舶报告系统数据驱动的应用
1.7本章小结1.8参考文献